国家需求
水下机器人等智能装备是海洋强国开展水下竞争的关键装备,发展复杂、浑浊条件下的水下触觉感知能力,是水下机器人迈向更敏锐、更精细、更智能的重要基础
关键问题
浑浊、强扰动等复杂环境下水下机器人近场感知存在水下机器人近场感知精度差、易受干扰的短板,强海流背景下多源信号时频混叠的难题,水下机器人搭载仿生触觉传感器效能边界不明的技术瓶颈等问题挑战
核心技术
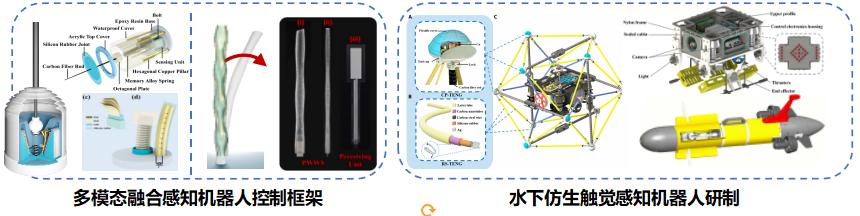
发明了系列抗干扰、高精度水下仿生触觉传感器,传感器灵敏度达1.23 mV/Pa,领先于国外0.057 mV/Pa;提出了基于自适应变分模态分解的混叠信号解耦与触觉特征提取方法;研发了高静压环境下双层柔性中空密封屏蔽技术;建立了数模共融的超分辨率流场重构模型,提升了4倍流场重构空间分辨率。
成果应用
相关技术已在水下目标探测和海洋工程作业等场景开展应用验证。技术成果被中远海运集团等单位应用,船体检测效率提升5倍,海产品捕捞效率提升2倍。相关成果获辽宁省自然科学二等奖、中国仿真学会科学技术创新二等奖、中国产学研合作促进会创新成果奖一等奖,为水下机器人环境识别与精细操作提供关键技术支撑。
